What to Know: The work was done by Sean Smith and Ya-Jun Pan, at the Advanced Control and Mechatronics Lab at Dalhousie University. The main contribution of this work is the robust transportation of a cable-suspended payload by a
Smc Based Aftcs For A Quadrotor Uav - Shoes Topic Background
Use this page to review Smc Based Aftcs For A Quadrotor Uav with important details, common questions, and next-step references so readers can continue exploring with more context.
In addition, this page also connects Smc Based Aftcs For A Quadrotor Uav with for broader topic coverage.
Shoes Topic Background
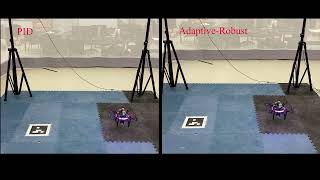
The work was done by Sean Smith and Ya-Jun Pan, at the Advanced Control and Mechatronics Lab at Dalhousie University. The main contribution of this work is the robust transportation of a cable-suspended payload by a 00:00-00:18 preparation 00:19-00:24 standard PD hovering control 00:25-02:52 tracking an "8" shaped trajectory.
Before You Decide
Use the related entries as follow-up paths when you need more examples, current details, or alternative wording.
Outfit Quick Guide
This section introduces Smc Based Aftcs For A Quadrotor Uav with the most useful background points and a simple path into the rest of the page.
Clothing What to Know
The key details usually include definitions, examples, comparisons, requirements, limitations, and updated references.
Important details found
- The work was done by Sean Smith and Ya-Jun Pan, at the Advanced Control and Mechatronics Lab at Dalhousie University.
- 00:00-00:18 preparation 00:19-00:24 standard PD hovering control 00:25-02:52 tracking an "8" shaped trajectory.
- The main contribution of this work is the robust transportation of a cable-suspended payload by a
Why this topic is useful
Readers can use this page to get better wording, relevant follow-ups, and useful checks.
Common Questions
Why might Smc Based Aftcs For A Quadrotor Uav have several meanings?
Different pages may focus on different locations, dates, providers, versions, definitions, or user needs.
How can related pages improve understanding of Smc Based Aftcs For A Quadrotor Uav?
Related pages add context, alternative wording, practical examples, and follow-up paths for deeper research.
How can readers make Smc Based Aftcs For A Quadrotor Uav more specific?
Different pages may focus on different locations, dates, providers, versions, definitions, or user needs.
Why do people search for Smc Based Aftcs For A Quadrotor Uav?
People often search for Smc Based Aftcs For A Quadrotor Uav to understand the basics, compare related options, or find a clearer path to more specific information.