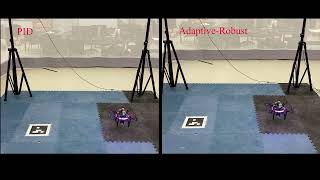
Discovery Notes: This video shows the experimental results of a novel control algorithm for trajectory tracking of a quadrotor. The work was done by Sean Smith and Ya-Jun Pan, at the Advanced Control and Mechatronics Lab at Dalhousie University.
Adaptive Observer Based Super Twisting Smc For Low Altitude Quadcopter Grasping - Fashion Important Clues
This browsing page gathers Adaptive Observer Based Super Twisting Smc For Low Altitude Quadcopter Grasping with reader questions, supporting entries, and related paths without losing the main context.
In addition, this page also connects Adaptive Observer Based Super Twisting Smc For Low Altitude Quadcopter Grasping with for broader topic coverage.
Fashion Important Clues
This video shows the experimental results of a novel control algorithm for trajectory tracking of a quadrotor. The work was conducted by Sean Smith and Ya-Jun Pan at the Advanced Control and Mechatronics Lab, Dalhousie University. Explore advanced nonlinear control techniques for quadrotor UAVs using
Verification Tips
Explore advanced nonlinear control techniques for quadrotor UAVs using The work was done by Sean Smith and Ya-Jun Pan, at the Advanced Control and Mechatronics Lab at Dalhousie University.
Starter Guide for Readers
A clean overview helps readers understand Adaptive Observer Based Super Twisting Smc For Low Altitude Quadcopter Grasping before moving into details, examples, or connected topics.
Shoes Use Case Context
This part keeps Adaptive Observer Based Super Twisting Smc For Low Altitude Quadcopter Grasping connected to practical references instead of leaving it as a single isolated phrase.
Useful notes from the results
- This video shows the experimental results of a novel control algorithm for trajectory tracking of a quadrotor.
- The work was done by Sean Smith and Ya-Jun Pan, at the Advanced Control and Mechatronics Lab at Dalhousie University.
- Explore advanced nonlinear control techniques for quadrotor UAVs using
- The work was conducted by Sean Smith and Ya-Jun Pan at the Advanced Control and Mechatronics Lab, Dalhousie University.
Why this overview helps
This format works because it offers a broader view for Adaptive Observer Based Super Twisting Smc For Low Altitude Quadcopter Grasping without relying on one result only.
Quick FAQ
What does Adaptive Observer Based Super Twisting Smc For Low Altitude Quadcopter Grasping usually mean?
Adaptive Observer Based Super Twisting Smc For Low Altitude Quadcopter Grasping usually refers to a topic that needs context, related examples, and supporting references before readers make decisions or continue searching.
Why are related topics included?
Related topics help readers compare nearby references, explore similar searches, and avoid relying on one narrow result.
What should readers compare for Adaptive Observer Based Super Twisting Smc For Low Altitude Quadcopter Grasping?
Readers should compare source freshness, practical relevance, related options, requirements, limitations, and any details that affect their next step.
How does Adaptive Observer Based Super Twisting Smc For Low Altitude Quadcopter Grasping connect to fashion?
Adaptive Observer Based Super Twisting Smc For Low Altitude Quadcopter Grasping can connect to fashion when readers need context, examples, comparisons, or practical next steps inside the same topic area.